
基于Kinect的人脸定义参数(FDP)模型重建研究 (2011年 2009级 万一,宋天罡,钱文倩,吕洲,丁新洋 )
时间:2012-06-04发布者:本站编辑点击量:1005
基于Kinect的人脸定义参数(FDP)模型重建研究
武汉大学2011年度国家大学生创新创业训练计划
2009级 万一,宋天罡,钱文倩,吕洲,丁新洋
指导老师:季铮
1. 研究简介
用于xbox360的Kinect自从2010年底首次发行以来,引起了巨大的反响,受到了游戏玩家的广泛关注,成为2011年度销售速度最快的IT产品,世界范围内销量达数千万。不仅如此,它及其快速的深度信息获取性能还引起了大量研究人员、教育家的兴趣,被尝试用于远程教育、机器人动作模仿、考古、近景摄影测量等诸多领域。
2. 研究成果
2.1 Kinect传感器的标定
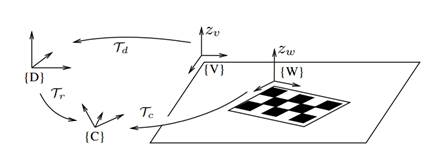
图2.1 标定的各坐标系关系
Kinect的各个传感器均遵循中心投影的基本原理,因此其标定方法的灵感均来源于传统摄影机标定的基本原理,其标定示意图如下:
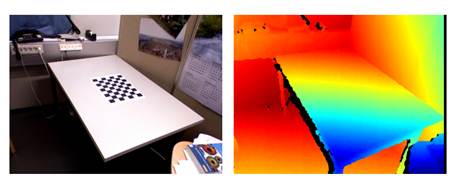
图2.2 标定时两个摄像头的视场
最终标定结果如下:
表2.1 彩色摄像头内参数
|
fcx |
fcy |
uc0 |
vc0 |
k1 |
k3 |
k4 | |
|
532.90
|
531.39
|
318.57
|
262.08
|
0.2447
|
-0.5744
|
0.0029
|
0.0065
|
表2.2 深度摄像头内参数
|
fdx |
fdy |
ud0 |
vd0 |
|
|
|
593.36
|
582.74
|
322.69
|
231.48
|
-0.00285
|
1091.0
|
表2-3 相对位置和姿态参数
|
|
trx |
try |
trz |
|
0.024
|
-21.4
|
0.7
|
1.0
|
最终使用该标定参数对各种表面进行测量后,测量结果的中误差约为3mm。
2.2 数据的处理和点云获取
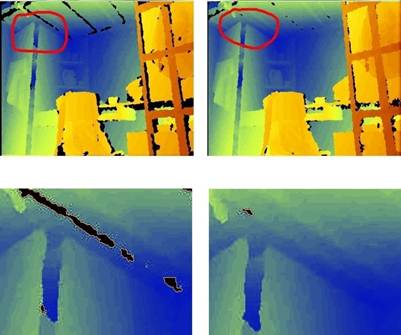
图2.3 数据的预处理和平均化




图2.4 左上为彩色图,右上为深度图下面两幅为不同角度观察的点云
通过深度图像的滤波和平均化处理,我们获得了较为平滑的深度图,再通过反投影过程,我们获得了点云,如图2.4所示。然后通过两种摄像头的相对位置和姿态关系,我们将纹理自动的贴附到表面模型上:

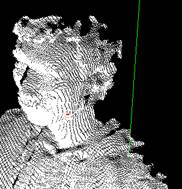
图2.5 纹理的自动贴附